หุ่นยนต์ขนถ่ายแบบแขนยืดหดได้สำหรับระบบจอดรถยนต์อัตโนมัติแบบหลายชั้นเชิงกล: การวิเคราะห์เปรียบเทียบอุปกรณ์สองรูปแบบ
คำนำ
เนื่องจากทรัพยากรที่ดินในเมืองเริ่มขาดแคลนมากขึ้น ลานจอดรถอัจฉริยะแบบ立体机械จึงกลายเป็นโซลูชันหลักในการขยายพื้นที่จอดรถสำหรับศูนย์การค้า ชุมชนที่อยู่อาศัย และจุดเชื่อมต่อการขนส่งสาธารณะ ส่วนอุปกรณ์ขนย้ายรถยนต์ซึ่งเป็นหน่วยปฏิบัติการหลักของลานจอดรถ立体机械 ความเสถียรในการทำงาน ประสิทธิภาพในการจัดเก็บและนำออก ความสามารถในการปรับตัว และความปลอดภัย ล้วนกำหนดความสามารถในการดำเนินงานโดยรวมและประสบการณ์การใช้งานของลานจอดรถโดยตรง
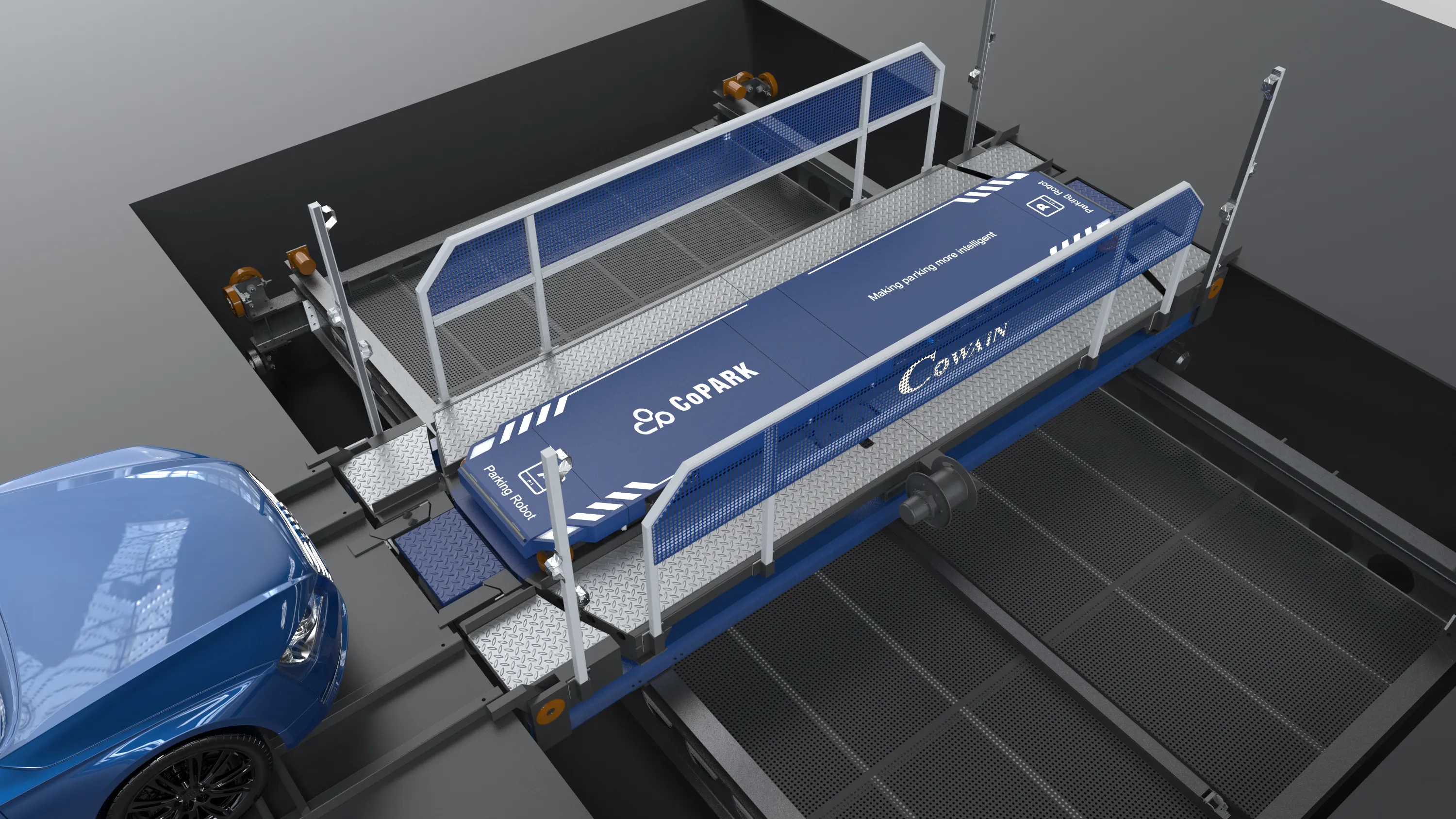
ตัวขนย้ายแบบฟันหวียืดหดสำหรับลานจอดรถ立体机械 ที่แนะนำในบทความนี้ เป็นอุปกรณ์ขนย้ายรถยนต์เฉพาะทางที่พัฒนาขึ้นสำหรับลานจอดรถ立体อัจฉริยะและระบบจอดรถแบบเคลื่อนที่ในแนวระนาบ โดยยกเลิกรูปแบบการขนย้ายแบบแผ่นรองพื้นรถยนต์แบบเดิม ใช้เทคโนโลยีการส่งต่อแบบฟันหวียืดหดไร้แผ่นรอง สามารถดำเนินการหลักๆ เช่น การเคลื่อนย้ายรถในแนวราบ การเชื่อมต่อการยกขึ้นลง และการจัดเก็บหรือนำรถออกจากตำแหน่งที่แม่นยำได้อย่างมีประสิทธิภาพ เนื้อหาต่อไปนี้จะวิเคราะห์รายละเอียดการออกแบบระบบไฟฟ้าอย่างละเอียดประกอบกับสถานการณ์การใช้งานจริงของอุปกรณ์ และอธิบายคุณค่าในทางปฏิบัติและข้อได้เปรียบทางเทคนิคของผลิตภัณฑ์ในทุกมิติ
เมื่อเทียบกับวิธีการขนย้ายแบบดั้งเดิม ตัวขนย้ายแบบฟันหวียืดหดนี้มีข้อได้เปรียบหลัก集中在สามมิติ ได้แก่ การปรับตัวสูง ความเสถียรสูง และความปลอดภัยสูง ผลิตภัณฑ์ใช้การออกแบบโครงสร้างที่กะทัดรัดและน้ำหนักเบา สามารถปรับให้เข้ากับรถยนต์พลเรือนที่มีระยะฐานล้อและความสูงใต้ท้องรถแตกต่างกัน ทำลายข้อจำกัดของรุ่นรถจากอุปกรณ์แบบดั้งเดิม อาศัยระบบควบคุมไฟฟ้าที่สมบูรณ์ ช่วยให้สตาร์ทและหยุดได้อย่างนุ่มนวลที่ความเร็วต่ำ และขนย้ายได้เสถียรที่ความเร็วสูง เพิ่มประสิทธิภาพการจัดเก็บและนำรถออกจากลานจอดรถอย่างมาก ติดตั้งกลไกป้องกันความปลอดภัยทางไฟฟ้าครบชุด สามารถปรับให้เข้ากับสภาพแวดล้อมการทำงานที่ซับซ้อนของลานจอดรถ เช่น ความชื้น ฝุ่นละออง และการทำงานต่อเนื่องเป็นเวลานาน ในขณะเดียวกัน การออกแบบการจัดวางระบบไฟฟ้าแบบโมดูลาร์ช่วยลดโอกาสเกิดข้อขัดข้องของอุปกรณ์และความยากในการบำรุงรักษาในระยะหลังได้อย่างมาก
ปัจจุบัน ตัวขนย้ายแบบฟันหวียืดหดที่ใช้งานอยู่สามารถแบ่งออกเป็นสองประเภทตามรูปแบบการขับเคลื่อน ได้แก่ ประเภทขับเคลื่อนด้วยมอเตอร์ธรรมดา และประเภทขับเคลื่อนด้วยเซอร์โวมอเตอร์ ทั้งสองประเภทไม่มีความแตกต่างในหลักการทำงาน แต่มีความแตกต่างอย่างมากในการออกแบบระบบส่งกำลังและการออกแบบควบคุมไฟฟ้า

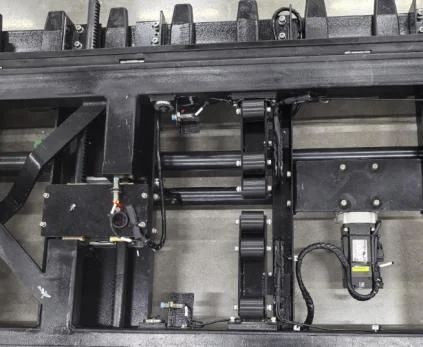
ฟันหวียืดหดแบบเซอร์โว

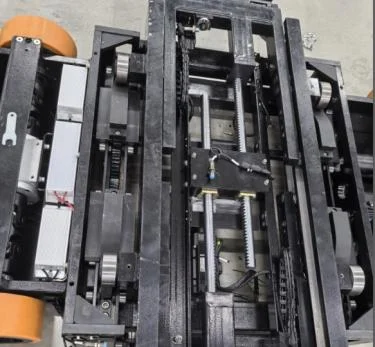
ฟันหวียืดหดแบบมอเตอร์สามเฟส
ดังที่เห็นจากภาพด้านบน ไม่ว่าจะเป็นโครงสร้างอุปกรณ์หรือการจัดวางระบบไฟฟ้า ต่างก็แตกต่างกันโดยสิ้นเชิง ต่อไปนี้จะวิเคราะห์ความแตกต่างระหว่างทั้งสองอย่างละเอียดจากมุมมองทางไฟฟ้า โดยเน้นที่จุดสำคัญในการออกแบบไฟฟ้าของตัวขนย้ายแบบควบคุมด้วยเซอร์โว
การวิเคราะห์รายละเอียดการออกแบบไฟฟ้าอย่างละเอียด
1. หลักการตรวจจับ
หลักการตรวจจับของตัวขนย้ายทั้งสองประเภทโดยพื้นฐานเหมือนกัน แต่เนื่องจากความแตกต่างในการออกแบบโครงสร้างเชิงกล จึงทำให้วิธีการตรวจจับแตกต่างกันอย่างมาก
1-1 วิธีการออกแบบเซนเซอร์ตำแหน่ง
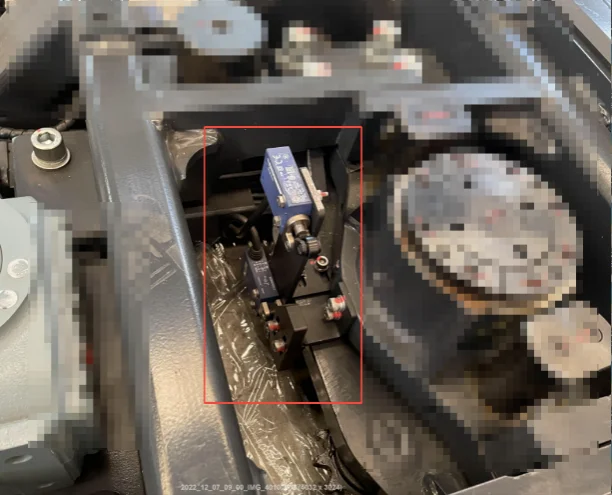
เซนเซอร์ตำแหน่งของตัวขนย้ายทั้งสองประเภท หนึ่งใช้สวิตช์แม่เหล็ก อีกหนึ่งใช้สวิตช์สะท้อนแสง
วิธีการระบุตำแหน่งทั้งสองแบบอาศัยเซนเซอร์หาตำแหน่งโดยใช้ตัวกำหนดตำแหน่ง
1-2 การตรวจจับการหดกลับของฟันหวียืดหด
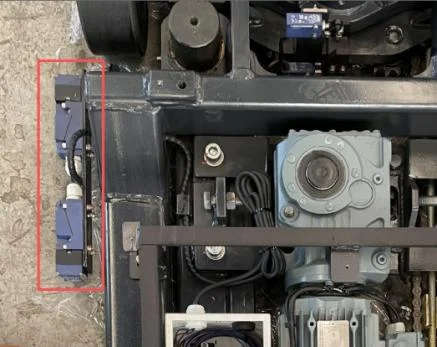
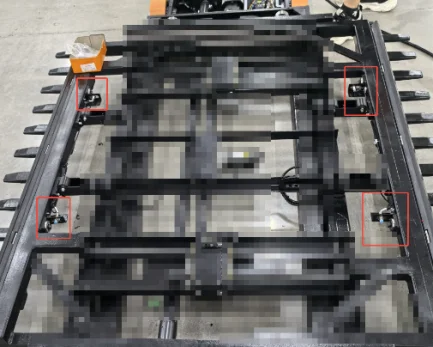
สวิตช์หดกลับของฟันหวียืดหดด้านหน้าและด้านหลังรุ่นมอเตอร์สามเฟส
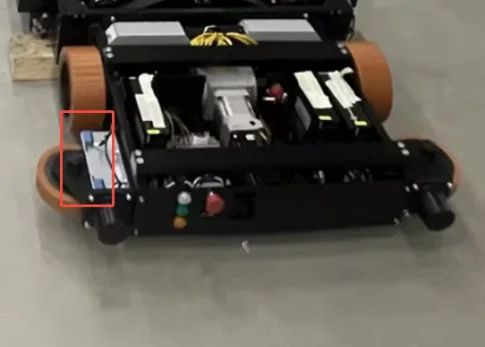
เซนเซอร์หดกลับของฟันหวียืดหดด้านหน้าและด้านหลังรุ่นเซอร์โวมอเตอร์
วิธีการตรวจจับการหดกลับของฟันหวียืดหดเหมือนกัน โดยทั้งหมดอาศัยการตรวจจับตำแหน่งของโครงฟันหวีเองเพื่อกระตุ้นสวิตช์
1-3 การตรวจจับการยืดออกของฟันหวียืดหด
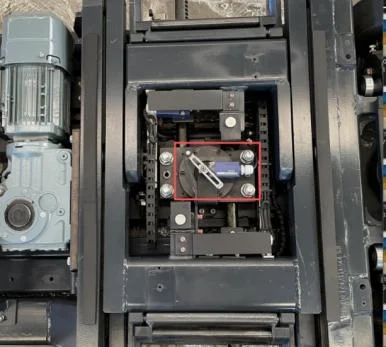
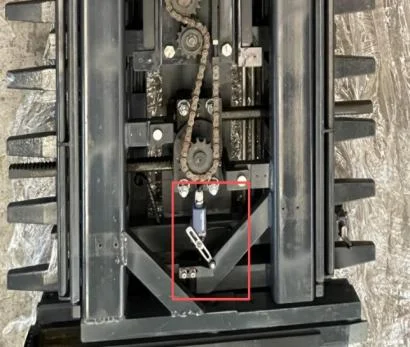
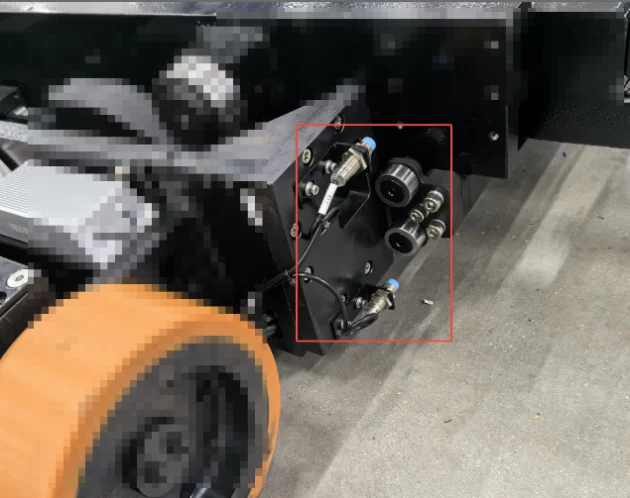
สวิตช์ยืดออกของฟันหวียืดหดด้านหน้าและด้านหลังรุ่นเซอร์โวมอเตอร์


การยืดออกจนถึงตำแหน่งของฟันหวียืดหดด้านหน้าและด้านหลังรุ่นมอเตอร์สามเฟส
วิธีการตรวจจับการยืดออกจนถึงตำแหน่งของอุปกรณ์ทั้งสองประเภทเหมือนกัน หลักการคือเมื่อแผ่นพับยืดสัมผัสกับล้อรถ จะทำให้เซนเซอร์รับสัญญาณกระตุ้น
1-4 การตรวจจับตำแหน่งยกขึ้น-ลง
วิธีการตรวจจับตำแหน่งยกขึ้น-ลงของอุปกรณ์ทั้งสองประเภทโดยพื้นฐานเหมือนกัน สวิตช์จะถูกยึดไว้กับที่ และตรวจจับตำแหน่งการยกขึ้น-ลงเพื่อกำหนดว่าการยกเสร็จสมบูรณ์หรือไม่
2. ระบบควบคุมไฟฟ้า
2-1 การออกแบบระบบฮาร์ดแวร์ควบคุมไฟฟ้า
อุปกรณ์เซอร์โวใช้สถาปัตยกรรมไฟฟ้าแบบโมดูลาร์กระจาย ระบบควบคุมโดยรวมประกอบด้วยหน่วยหลัก 5 หน่วย ได้แก่ ตัวควบคุม PLC หลัก โมดูลขับเคลื่อนเซอร์โว โมดูลตรวจจับเซนเซอร์ โมดูลปฏิบัติการยืดหด และโมดูลสื่อสารโต้ตอบ แต่ละโมดูลทำงานอิสระและประสานงานกัน ข้อดีของการออกแบบแบบโมดูลาร์มีความชัดเจน ในด้านหนึ่ง การเดินสายวงจรเป็นระเบียบ พื้นที่วงจรแบ่งชัดเจน วงจรไฟฟ้าแรงสูงและแรงต่ำแยกออกจากกัน หลีกเลี่ยงการรบกวนระหว่างสายไฟได้อย่างมีประสิทธิภาพ ลดโอกาสเกิดไฟฟ้าลัดวงจรหรือไฟฟ้ารั่ว ในขณะเดียวกัน การออกแบบอินเทอร์เฟซไฟฟ้ามาตรฐานสามารถปรับให้เข้ากับระบบควบคุมลานจอดรถ立体机械ที่มีอยู่ในตลาดได้อย่างสมบูรณ์แบบ มีความเข้ากันได้สูง

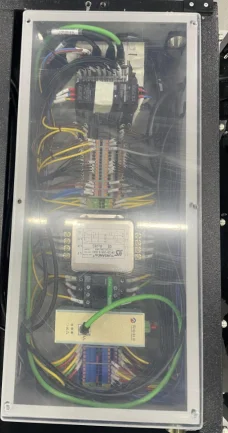
การออกแบบแผ่นปิดโปร่งใสกันฝุ่นช่วยให้สังเกตภายในได้โดยไม่ต้องถอดฝา ช่วยเพิ่มความสะดวกในการบำรุงรักษาให้มากที่สุด กล่องควบคุมถูกยึดเข้ากับอุปกรณ์โดยใช้แผ่นรองกันกระแทก การสั่นสะเทือนระหว่างการทำงานของอุปกรณ์ส่วนใหญ่จะถูกดูดซับโดยแผ่นรองกันกระแทก นอกจากนี้ ขั้วต่อสายไฟทั้งหมดใช้การยึดแบบสปริง ป้องกันปัญหาการหลวมของขั้วต่อเนื่องจากการสั่นสะเทือนของอุปกรณ์
ตัวขนย้ายมีระบบควบคุมสมบูรณ์ในตัว ดังนั้นตัวขนย้ายแบบเซอร์โวจึงสามารถมีอยู่ในรูปของผลิตภัณฑ์มาตรฐาน เพียงต้องจ่ายไฟสามเฟสให้กับมัน ส่วนที่เหลือสามารถควบคุมการทำงานผ่านการสื่อสารไร้สายได้
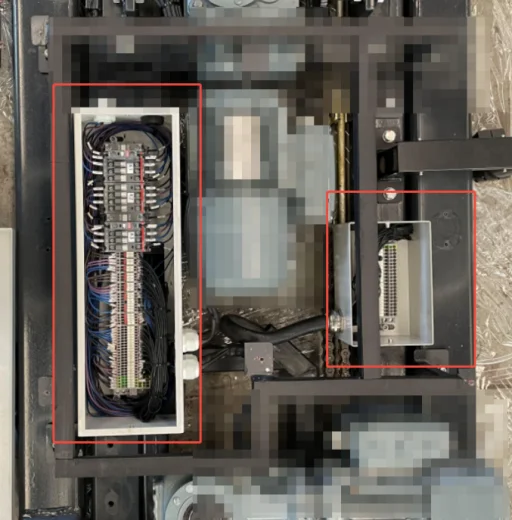
กล่องไฟฟ้าภายในตัวขนย้ายรุ่นมอเตอร์สามเฟสมีเฉพาะคอนแทคเตอร์และขั้วต่อสายไฟ เนื่องจากข้อจำกัดด้านพื้นที่ ระบบควบคุมไม่สามารถรวมอยู่ในตัวขนย้ายได้ จึงต้องส่งสัญญาณและการควบคุมของอุปกรณ์ออกไปควบคุมจากภายนอก ดังนั้นตัวขนย้ายนี้จึงต้องเชื่อมต่อสายเคเบิลสองชุด ชุดหนึ่งเป็นระบบไฟฟ้าแรงสูงที่ควบคุมเอาต์พุตของมอเตอร์ อีกชุดเป็นสายเคเบิลที่รวบรวมสัญญาณควบคุมทั้งหมดของตัวขนย้าย สายเคเบิลทั้งสองชุดมีแกนจำนวนมาก และจำเป็นต้องใช้ม้วนสปริงสองชุดภายนอกเพื่อควบคุมการม้วนและคลายสายเคเบิล จากมุมมองของการควบคุมต้นทุนโดยรวมและความเสถียรของอุปกรณ์ ไม่ได้สูงกว่ารุ่นเซอร์โว
2-2 การออกแบบระบบควบคุมไฟฟ้า
อุปกรณ์ติดตั้งวงจรควบคุมลอจิกอัจฉริยะความแม่นยำสูง อาศัยระบบควบคุม PLC เป็นหลัก ควบคู่กับอัลกอริธึมควบคุมป้อนกลับแบบเซอร์โว เพื่อให้การควบคุมการเคลื่อนที่ การยืดหด การจัดตำแหน่ง และการส่งต่อครบวงจรอย่างแม่นยำ ระบบควบคุมมีลอจิกปรับตัวเองในตัว สามารถปรับระยะยืดหดของฟันหวีและวิถีการเคลื่อนที่โดยอัตโนมัติตามน้ำหนักรถ ระยะฐานล้อ และความคลาดเคลื่อนของตำแหน่งจอด ทำให้การส่งต่อรถแม่นยำไม่มีคลาดเคลื่อน ในขณะเดียวกัน วงจรรวมฟังก์ชันตรวจสอบข้อบกพร่องด้วยตนเองและการตอบกลับอัจฉริยะ ขณะอุปกรณ์ทำงาน จะตรวจจับสถานะสาย เซนเซอร์ และสภาพมอเตอร์แบบเรียลไทม์ เมื่อเกิดความผิดปกติ จะกระตุ้นการแจ้งเตือนด้วยเสียงและแสงทันที และบันทึกรหัสข้อบกพร่อง พร้อมอัปโหลดไปยังระบบควบคุมกลางของลานจอดรถ ช่วยให้เจ้าหน้าที่บำรุงรักษาสามารถตรวจสอบข้อบกพร่องได้อย่างรวดเร็ว นอกจากนี้ยังรองรับฟังก์ชันสตาร์ท-หยุดอัตโนมัติ การยกขึ้นลงแบบเชื่อมต่อ และการจัดลำดับอัจฉริยะ สามารถปรับให้เข้ากับการทำงานร่วมกันของอุปกรณ์หลายตัว เพิ่มประสิทธิภาพการจัดเก็บและนำรถออกโดยรวมของลานจอดรถอย่างมาก
เมื่อเทียบกับระบบควบคุมเซอร์โว การควบคุมมอเตอร์สามเฟสแบบดั้งเดิมอาศัยอินเวอร์เตอร์ การควบคุมอินเวอร์เตอร์ยังห่างไกลจากระบบควบคุมเซอร์โวในแง่ของการระบุตำแหน่งที่แม่นยำ และความเร็วในการตอบสนองของมอเตอร์ก็แตกต่างกันอย่างชัดเจน ความแตกต่างหลักสองประการนี้ทำให้ความเร็วในการจัดเก็บและนำรถแตกต่างกันอย่างเห็นได้ชัด ระบบเซอร์โวเร็วกว่าระบบมอเตอร์สามเฟส 30%
แต่มอเตอร์สามเฟสแบบดั้งเดิมก็ไม่ได้ไร้ข้อดี เนื่องจากใช้มอเตอร์ธรรมดา จึงไม่มีความต้องการสูงต่อสภาพแวดล้อม ทำงานได้เสถียรในสภาพแวดล้อมที่มีอุณหภูมิสูง ความชื้นสูง และการสั่นสะเทือน นอกจากนี้ ไม่ต้องพึ่งพาการสื่อสารในการควบคุม จึงช่วยลดความล่าช้าหรือไม่สามารถควบคุมอุปกรณ์อันเนื่องมาจากความเร็วหรือความผิดพลาดในการสื่อสาร ตัวขนย้ายมักใช้ร่วมกับรถเคลื่อนที่ในแนวขวาง โดยใช้ PLC ตัวเดียวกันควบคุมทั้งรถเคลื่อนที่และตัวขนย้าย พิจารณาจากการแลกเปลี่ยนข้อมูลภายในแล้วมีความทันท่วงที เสถียร และควบคุมได้มากกว่า
สรุปท้าย
ข้างต้นคือการวิเคราะห์และเปรียบเทียบโครงสร้างที่แตกต่างกันสองแบบของตัวขนย้ายแบบฟันหวียืดหด ในฐานะส่วนประกอบหลักของลานจอดรถ立体机械 ตัวขนย้ายทั้งสองประเภทมีข้อดีและข้อเสียต่างกัน จำเป็นต้องเลือกให้เหมาะสมกับแต่ละโครงการ ในอนาคตเมื่ออุตสาหกรรมจอดรถอัจฉริยะก้าวหน้าขึ้น ผลิตภัณฑ์จะยังคงปรับปรุงเทคโนโลยีการควบคุมไฟฟ้าอัจฉริยะและการประหยัดพลังงาน เพื่อให้เหมาะกับสถานการณ์จอดรถที่ชาญฉลาดและหนาแน่นมากขึ้น สนับสนุนการเพิ่มประสิทธิภาพและขยายพื้นที่ในการจราจรนิ่งของเมือง
About the Author